Przemysł Zbrojeniowy
ORP „Kormoran” odsłania tajemnice [FOTO]



Eston Kohver został porwany przez rosyjską FSB. Na zdjęciu ćwiczenia wojskowych jednostek specjalnych. Fot. mil.ru. 
Źródło: Gazprom.ru 
Fot. US MDA 
Fot. Rosneft.com 


Fot. NASA 




Okręt ORP „Kormoran” to najnowszy i prawdopodobnie najlepiej obecnie wyposażony okręt przeciwminowy na świecie. Niżej prezentowany jest przegląd jego jawnego sprzętu pokładowego. Dzięki temu będzie można pokazać, w jaki sposób będzie działał nowy polski niszczyciel min.
Z okazji uroczystego podniesienia bandery na niszczycielu min ORP „Kormoran”, 8. Flotylla Obrony Wybrzeża udostępniła okręt dla dziennikarzy. Dzięki temu można było po raz pierwszy oficjalnie zobaczyć jawne wyposażenie, które polskie siły morskie otrzymały wraz z nowym okrętem. Duża część z tego sprzętu jest czymś zupełnie nowym w całej Marynarce Wojennej RP.
Czym jest ORP „Kormoran”?
ORP „Kormoran” o numerze burtowym „601” ma być pierwszym z trzech planowanych do wdrożenia okrętów projektu 258. Wszystkie te jednostki mają trafić do 13. Dywizjonu Trałowców wchodzącego w skład 8. Flotylli Obrony Wybrzeża. Okręt został zbudowany przez konsorcjum składające się ze stoczni Remontowa Shipbuilding z Gdańska i Ośrodka Badawczo Rozwojowego Centrum Techniki Morskiej (OBR CTM) z Gdyni.
Głównym zadaniem nowych, polskich niszczycieli min ma być poszukiwanie, klasyfikacja, identyfikacja i zwalczanie min morskich oraz improwizowanych, podwodnych ładunków wybuchowych, rozpoznanie torów wodnych, przeprowadzanie jednostek przez akweny zagrożenia minowego, stawianie min oraz zdalne sterowanie samobieżnymi platformami przeciwminowymi.
Na „Kormoranie”, podobnie jak większości innych, nowoczesnych okrętów przeciwminowych znacznie ograniczono pola fizyczne okrętu. Okręt jest więc wyciszony, co zmniejsza prawdopodobieństwo wzbudzenia zapalników akustycznych min, oraz ma kadłub wykonany ze stali amagnetycznej - co z kolei zmniejsza prawdopodobieństwo wzbudzenia zapalników magnetycznych.
Zbudowano stosunkowo dużą jednostkę w porównaniu z jej odpowiednikami w krajach zachodnich. Ma ona bowiem długość 58,5 m, szerokość 10,3 m, zanurzenie 2,7 m i wyporność 830 ton. Pozwala to jednak na działanie praktycznie w każdych warunkach atmosferycznych i na każdym akwenie (poza zamarzniętą strefą arktyczną).

ORP „Kormoran” porusza się dzięki dwóm pędnikom cykloidalnym Voit-Schneidera, napędzanym przez dwa silniki wysokoprężne MTU o mocy 1000 kW – 1360 KM. Pozwalają one na poruszanie się z prędkością 15 w. Okręt posiada bardzo dobre właściwości manewrowe, również dzięki zastosowaniu dziobowego steru strumieniowego Schottel. Niszczyciel min może więc się obracać praktycznie w miejscu i utrzymywać na morzu stałą pozycję (dzięki systemowi dynamicznego pozycjonowania).

Standardowy zasięg ORP „Kormoran” to 2500 Mm a autonomiczność to 10 dób. Parametry te można jednak zwiększyć, ponieważ niszczyciel min ma możliwość uzupełniania zapasów paliwa, wody i materiałów stałych na morzu. Może to się odbywać z innego okrętu (z wykorzystaniem systemu uzupełniania zapasów na morzu RAS - Replenishment at sea dla ładunków stałych umieszczonym na śródokręciu) jak również ze śmigłowców w ramach operacji VERTREP (VERTical REPlenishment). Testy były już prowadzone w czasie prób stoczniowych ze śmigłowcem pokładowym typu SH-2G.

Pomimo zastosowania stali amagnetycznej kadłub okrętu jest wytrzymały i według Polskiego Rejestru Statków posiada znak wzmocnień lodowych (klasę lodową) L3. Można więc na „Kormoranie” pływać samodzielnie na morzach niearktycznych: w rozrzedzonych i drobno pokruszonych lodach oraz za lodołamaczem w lekkich warunkach lodowych przez cały rok. Okręt ma wewnątrz cytadelę chroniącą załogę przed skażeniami. Dodatkowo na pokładzie rozmieszczono wyloty systemu zraszania i dezaktywacji skażeń.

Stałą załogę stanowi 45 osób (w tym 7 oficerów), ale okręt jest przystosowany do przyjęcia na pokład grupy płetwonurków minerów w składzie: dwie pary nurkowe oraz kierownik nurkowania.

Środki wykrywania min
Głównymi sensorami wykorzystywanymi przez ORP „Komoran” do wykrywania i identyfikacji min są sonary. Na okręcie zastosowano w sumie trzy rodzaje takich urządzeń. Głównym sensorem jest niewątpliwie sonar podkilowy SHL-100 opracowany przez OBR CTM. Sonar ten pozwala na przeszukiwanie przestrzeni pod okrętem, ale tylko do pewnej głębokości.
Przy niesprzyjającym rozkładzie temperatur może bowiem dojść do sytuacji, że fale akustyczne mogą się odbić od jakiejś warstwy wody i nie dotrzeć do dna, gdzie również mogą być umieszczone miny. Dlatego na „Kormoranie” zastosowano dodatkowy sonar, który można opuścić głęboko pod powierzchnię wody, a dodatkowo można wysunąć go nawet na kilkaset metrów do przodu – przed okręt.

System oznaczony jako SPVDS (Self Propelled Variable Depth Sonar) oparty jest na szwedzkim pojeździe podwodnym Double Eagle Mark III (produkowanym przez firmę Saab), pod którym podwieszono antenę francuskiego sonaru TSM 2022 MkII (a właściwie jej specjalnie pomniejszoną wersję).

Zastosowano najnowszą wersję pojazdu Double Eagle – Mk III, która od wersji Mk II (stosowanej np. na francuskich niszczycielach min typu Eridan) różni się przede wszystkim wielkością (jest dłuższa o 80 cm i cięższa o 130 kg) oraz układem pędników (napęd główny stanowią cztery a nie dwa ruchome rufowe pędniki o mocy 7 kW). Zwiększyło to zarówno udźwig jak i manewrowość. Układ czterech ruchomych, poziomych pędników rufowych oraz czterech stałych, pionowych pędników w kadłubie daje bowiem możliwość dowolnego ustawiania pojazdu i jego stabilizowania w trzech płaszczyznach (pomimo podwieszenia ciężkiej anteny sonaru). Sam pojazd ma z przodu umieszczone źródło światła i kamerę, a więc prawdopodobnie można go też wykorzystać do szybkiej identyfikacji wykrytych obiektów.
Poprzez wprowadzenie na „Kormorana” systemu PVDS wyeliminowano dwie podstawowe wady, jakie mają okręty posiadające tylko podkilowe sonary poszukiwania min. Po pierwsze zastosowanie pojazdu Double Eagle z sonarem, pozwala w czasie rzeczywistym sprawdzać akwen bez konieczność zbliżenia się okrętu do strefy zagrożenia (sonar na pojeździe można bowiem wypuścić kilkaset metrów przed dziobem jednostki pływającej). Po drugie przez zanurzenie pojazdu można poszukiwać miny w strefie dennej, która ze względu na istnienie warstw wody o różnych temperaturach (mogących odbijać wysyłane z sonaru fale akustyczne) często jest niewidoczna dla okrętu korzystającego tylko z sonaru podkilowego.

Do opuszczania sonaru SPVDS wykorzystuje się dźwig HIAB XS 544 E-6 HiPro z wysuwanym ramieniem umieszczony na pokładzie rufowym. Może on wysuwać ramię na odległość aż do 15,4 m mogąc na tym zasięgu podnosić ładunek o wadze 750 kg (na wodach otwartych) i 1460 kg (na wodach osłoniętych i w portach). Przy skracaniu ramienia ten dopuszczalny ładunek się zwiększa i przy długości 9 m wynosi już kolejno 1500 kg/2600 kg, a przy długości 4,4 m – 4000 kg/6600 kg.

Sam pojazd jest sterowany za pomocą kabloliny, która jest nawinięta na bęben i wypuszczana z układu mechanicznego zamontowanego na górnym pokładzie śródokręcia, na prawej burcie. Lina ta jest prowadzona za pomocą rozsuwanego boomu, który ją prowadzi w oddaleniu od prawej burty. Dzięki temu SPVDS może się poruszać równolegle do okrętu (z prawej burty), jak również przed niszczycielem min bez niebezpieczeństwa nawinięcia się kabloliny w śruby.

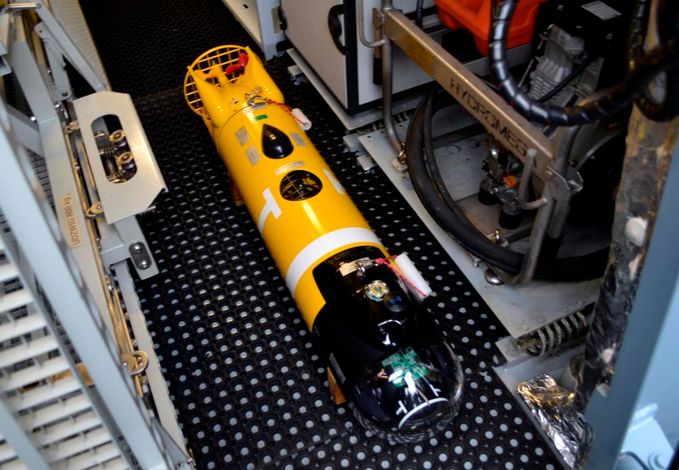
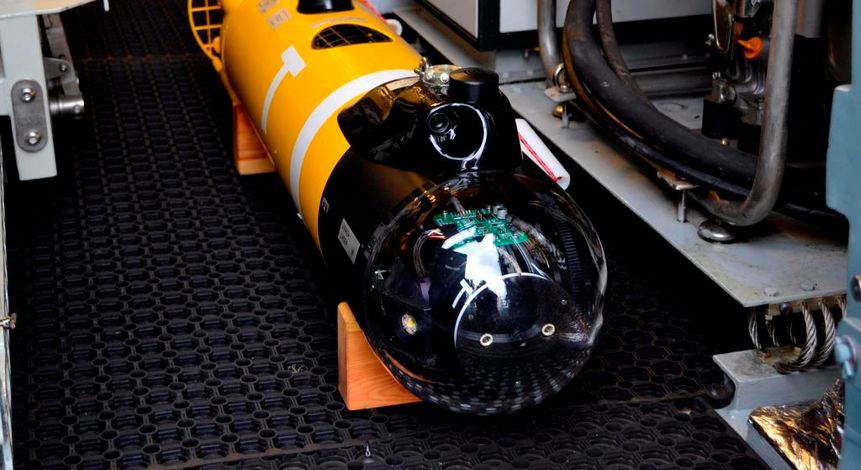
Trzeci rodzaj sonaru, jaki wykorzystuje się na „Kormoranie” został zamontowany na autonomicznym pojeździe podwodnym Hugin produkowanym przez firmę Kongsberg. Jest to dron, który pozwala na dokładne mapowanie dna morskiego działając samodzielnie w oddaleniu od okrętu-matki i to przez ponad 35 godzin. Ma on w tym celu zamontowane na burtach anteny sonaru obserwacji bocznej z syntetyczną aperturą HISAS 1032.

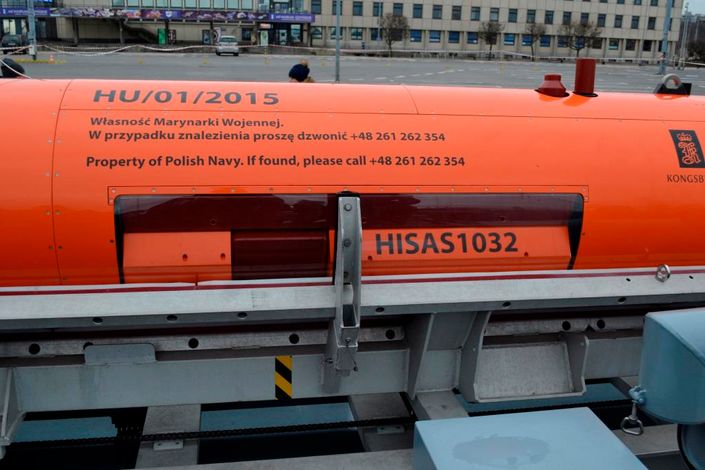
Cały system opuszczania i podnoszenia z wody jest umieszczony na pokładzie rufowym z prawej burty. Specjalnie w tym celu zamontowano po prawej stronie pawęży rufowej oddzielny właz, przez który dron jest zsuwany w dół.

Do kalibracji tych wszystkich sonarów na okręcie wykorzystuje się specjalne miny ćwiczebne, które dla lepszego rozróżnienia pomalowane są w biało czerwone pasy. W normalnych działaniach są one opuszczane do wody za pomocą dźwigu, ponieważ „Kormoran” nie posiada torów minowych na stałe zamontowanych w pokładzie. Według załogi tory te mogą być położone z wykorzystaniem specjalnych zaczepów umieszczonych pod gumowym gretingiem. Wtedy „Kormoran” może być również wykorzystywany do stawiania min.

Zaczepy te mogą być dodatkowo stosowane do przymocowywania kontenerów zadaniowych postawionych na lewej burcie pokładu rufowego.

System zwalczania min
Obiekty podwodne wykryte za pomocą sonarów są później identyfikowane i po zakwalifikowaniu jako niebezpieczne – niszczone. Można to robić trzema zasadniczymi sposobami. Najszybszy polega na wykorzystaniu jednorazowych, samobieżnych ładunków wybuchowych do niszczenia min typu Głuptak (opracowanych przez Politechnikę Gdańską). Są one sterowane za pomocą światłowodu, którym przekazuje się komendy oraz obraz z kamer dronu.
Unikalnym rozwiązaniem w tym pojeździe jest specjalna głowica obrotowa umieszczona w oszklonej głowicy Głuptaka, która pozwala na atakowanie miny nawet wtedy, gdy pojazd nie znajduje się w odniesieniu do niej prostopadle. Przeprowadzenie takiego ataku jest niekiedy bardzo trudne, ze względu na silne prądy i roślinność. Ważne jest również bezpieczeństwo przechowywania, ponieważ wybuchowy ładunek niszczący jest montowany na pojeździe dopiero przed misją.
Głuptak jest napędzany czterema pędnikami śrubowymi rozmieszczonymi symetrycznie z tyłu kadłuba. Silnik elektryczny znajdujący się w szczelnej kapsule pozwala na poruszanie się w wodzie z prędkością 3 m/s. Na okręcie wykorzystywane są dwa typy takich dronów: inspekcyjne, które można wykorzystywać kilkakrotnie do identyfikacji obiektów i jednorazowe, które wybuchając niszczą niebezpieczny obiekt podwodny.
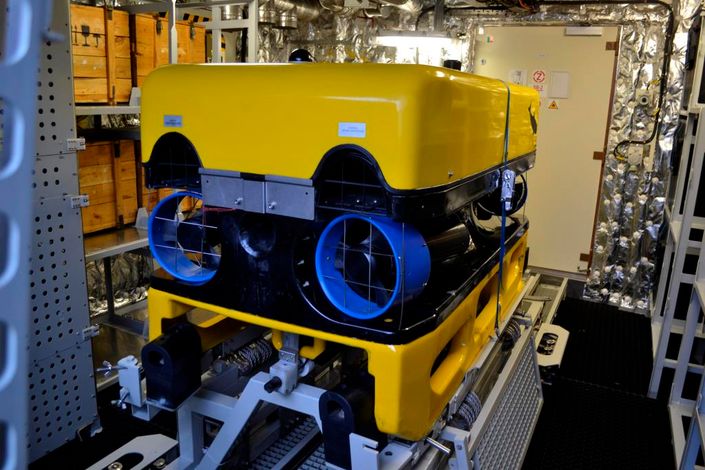
Kolejny sposób rozpoznania i niszczenia obiektów przeciwminowych polega na wykorzystaniu zasilanego i kierowanego przewodowo robota podwodnego typu Morświn (opracowanego przez Politechnikę Gdańską). Jest on przechowywany w hangarze umieszczonym przy prawej burcie i wysuwany na specjalnym wózku po rozkładanych na pokładzie rufowym szynach.

Morświn powstał na bazie doświadczeń z wykorzystania robotów podwodnych Ukwiał na zmodernizowanych trałowcach projektu 206FM. Wykorzystując opinie użytkowników, na nowe niszczyciele min zbudowano pojazd większy (o długości - 1,6 m, szerokości – 0,85 m i wysokości 1,00 m), który ma większą moc pędników, a więc jest łatwiejszy do sterowania w wodach o silnych prądach.
Morświn bez ładunku użytecznego waży 325 kg, a z ładunkiem - do 500 kg. Cały system – wliczając w to bęben z kabloliny o długości do 1000 m waży 3000 kg. Pojazd może działać na głębokościach od 5 do 200 m i w promieniu 400 m od okrętu nosiciela (przy kablolinie o standardowej długości 1000 m).

Dzięki modułowej budowie i modułowemu wyposażeniu Morświn jest wykorzystywany zarówno do poszukiwania min, ich neutralizacji jak i prowadzenia prac podwodnych. Do obserwacji podwodnej mogą być używane sonar obserwacji bocznej, echosonda wielowiązkowa, cyfrowa kamera oraz magnetometr. Prace podwodne są realizowane za pomocą długiego manipulatora, natomiast niszczenie min odbywa się poprzez dostarczenie do niebezpiecznych obiektów bezprzewodowo odpalanych ładunków wybuchowych TOCZEK w wersji A, B i C (opracowanych i produkowanych przez OBR CTM).

ORP „Kormoran” jest przystosowany również do niszczenia min przez jednostki płetwonurków minerów. To właśnie dla ich potrzeb wydzielono specjalny hangar z wejściem z pokładu rufowego przy lewej burcie. Znajduje się w nim przede wszystkim komora dekompresyjna (z tzw. „pełną dekompresją leczniczą”) opracowana na bazie systemu kontenerowego „Sercówka”. Jest ona wykorzystywana po wypadku nurkowym oraz może służyć jako zaplecze treningowe przygotowując płetwonurków do schodzenia do 70 m pod wodę. W porównaniu do „Sercówki” jest to komora trochę mniejsza, ale mieszcząca wewnątrz sześć osób. Może więc być również wykorzystywana podczas akcji ratowniczych.

Hangar „nurkowy” jest dodatkowo miejscem przygotowania sprzętu nurkowego – np. ładowania butli nurkowych. Można to również robić na zewnątrz, ponieważ tuż przy wrotach do hangaru umieszczono panel połączeniowy do zasilania z zewnątrz aparatów nurkowych - z wyjściami dla powietrza oddechowego, mieszaniny oddechowej i tlenu.

Pomocą w działaniach grupy płetwonurków minerów może być łódź motorowa umieszczona na lewej burcie, opuszczana do wody za pomocą własnego żurawika.

System obserwacji nawodnej
Niszczyciel min „Kormoran” nie posiada radarów wykrywania celów powietrznych, a jedynie system obserwacji nawodnej. W jego skład wchodzą przede wszystkim dwa radary nawigacyjne firmy Raytheon z antenami „belkowymi” (dłuższą na pasmo S i krótszą na pasmo X). Wybór dwóch różnych pasm jest nieprzypadkowy. O ile bowiem radary na wyższych częstotliwościach (pasmo X) zapewniają większą rozdzielczość, to radary na niższych częstotliwościach mają większy zasięg i większą odporność na zakłócenia atmosferyczne (np. deszcz lub opady śniegu).

Zobrazowanie z tych stacji radiolokacyjnych może być przedstawione na własnym monitorze jak również nałożone na mapę elektroniczną przedstawioną w konsoli wojskowego systemu zobrazowania elektronicznej mapy i informacji nawigacyjnej WECDIS (Warship Electronic Chart Display and Information System). Dodatkowym źródłem informacji dla radarów oraz WECDIS jest system automatycznej identyfikacji statków AIS. Podobnie jak na innych polskich okrętach na „Kormoranie” zastosowano transponder firmy Saab – typu R5 w wersji wojskowej. Jego pulpit sterowania został zainstalowany na mostku ponad monitorem radaru i WECDIS.

Ważnym sensorem dla okrętu jest głowica optoelektroniczna. Zamontowane w niej kamery telewizyjne i termowizyjne pozwalają na prowadzenie obserwacji zarówno w dzień jak i w nocy. Okręt może tworzyć obraz sytuacji nawodnej korzystając również ze źródeł zewnętrznych otrzymując informacje drogą radiową (np. poprzez system transmisji danych taktycznych Link 11).

Ostatnim elementem systemu obserwacji technicznej jest system identyfikacji radiolokacyjnej „swój-obcy”. Na okręcie zastosowano jedynie transponder (urządzenie odpowiadające), którego antena jest umieszczona pod niewielka kopułką na wysięgniku przy topie masztu.

Okrętowy system walki i BCI
Miejscem skąd kieruje się działaniem bojowym „Kormorana” jest zlokalizowane wewnątrz okrętu - Bojowe Centrum Informacyjne. Znajdują się tam konsole wielofunkcyjne okrętowego systemu zarządzania walką SCOT-M. System ten wspomaga działalność bojową załogi w zakresie efektywnego wykorzystania wszystkich zastosowanych na okręcie sensorów i efektorów, w celu planowania misji poszukiwania, klasyfikacji, identyfikacji i niszczenia min morskich, wspomagania decyzyjnego, monitorowania realizacji zadań, raportowania oraz szkolenia i symulacji.

Standardowy scenariusz działania przewiduje wstępne wykrywanie, które odbywa się np. z wykorzystaniem autonomicznego pojazdu podwodnego typu Hugin 1000 opuszczanego z pokładu rufowego. Obiekty minopodobne wykryte sonarem bocznym tego dronu są później odszukiwane za pomocą sonaru podkilowego lub zdalnie sterowanego pojazdu z sonarem SPVDS.
Po klasyfikacji rozpoczyna się identyfikacja obiektu np. za pomocą zdalnie sterowanego pojazdu przeciwminowego jednorazowego użytku (np. Głuptak) lub pojazdów wielokrotnego użytku. Po pozytywnej identyfikacji rozpocznie się operacja niszczenia min. Wybór środka zależeć będzie od dowódcy okrętu, który podczas działań przeciwminowych cały czas znajduje się na BCI.
Zgodnie z wcześniej ujawnionym schematem organizacyjnym w Bojowym Centrum Dowodzenia niszczyciela min Kormoran II może pracować jednocześnie nawet siedemnastu operatorów.
Mostek
Podczas pokazu zorganizowanego dla dziennikarzy załoga zaprezentowała tylko jedno pomieszczenie wewnętrzne, które dowódca określił jako GSD (Główne Stanowisko Dowodzenia). W rzeczywistości zaprezentowano mostek zintegrowany skąd owszem - kieruje się ruchem okrętu, ale nie działaniami bojowymi. Podczas operacji przeciwminowych dowodzenie odbywa się bowiem z BCI i to tam znajduje się dowódca okrętu.


Według załogi na mostku nie umieszczono nawet wynośnej konsoli z BCI. Zintegrowano tam za to praktycznie wszystko, co jest potrzebne do kontrolowania okrętu w czasie pływania. Są tam więc m.in. monitory radarów, systemu WECDIS, systemu pozycjonowania okrętu, kamery termowizyjnej, urządzenia sterowania siłownią i kontrolowania stanu okrętu (ze schematem świateł nawigacyjnych, panelem sygnalizacyjnym drzwi wodoszczelnych i włazów, włącznikami pomp pożarowych i pomp spłukiwania okrętu oraz grupą urządzeń zdalnie wyłączanych w czasie pożaru).



Na wszystkich konsolach wielofunkcyjnych z monitorami można zobrazować dowolną, potrzebną w danej chwili informację.

Przy lewej burcie na mostku, za blokiem konsol głównych znajduje się oddzielne stanowisko tzw. „Yoemana”. Jest to m.in. specjalista od łączności taktycznej i wzrokowej. Jego zadaniem jest m.in. dekodowanie i kodowanie sygnałów, podwieszanie wszelkiego typu flag i operowanie światłem. Po lewej stronie mostka jest natomiast stanowisko robocze dla nawigatora.


Uzbrojenie ORP „Kormoran”
Głównym uzbrojeniem niszczyciela min ORP „Kormoran” jest dziobowa, dwulufowa armata Wróbel II kalibru 23 mm. Dodatkowym zabezpieczeniem okrętu (szczególnie przed zagrożeniami asymetrycznymi) są trzy wielkokalibrowe karabiny maszynowe kalibru 12,7 mm rozmieszczone na obu burtach na wysokości mostka oraz na pawęży rufowej.

Skromną ochronę przed zagrożeniem z powietrza mają zapewnić przenośne, przeciwlotnicze zestawy rakietowe typu Grom. Nie są one jednak montowane na wieloprowadnicowych, okrętowych wyrzutniach, takich jak np. FASTA-4M, ale będą prawdopodobnie odpalane tylko z ramienia przez marynarzy.

Poprawę sytuacji może przynieść dopiero wprowadzenie na niszczyciele min projektu 258 systemu artyleryjskiego AM-35 kalibru 35 mm. Zestaw ten ma bowiem większy zasięg oraz może wykorzystać amunicję programowalną.
System łączności na ORP „Kormoran”
ORP „Kormoran” nie ma oddzielnie zainstalowanych radiostacji, ale Okrętowy Zintegrowany System Łączności (OZSŁ) opracowany, wyprodukowany, zainstalowany i zintegrowany przez polską spółkę KenBIT – oddział w Gdyni. W systemie tym można wyróżnić podsystem łączności zewnętrznej i wewnętrznej.
W przypadku okrętowego, zintegrowanego systemu łączności zewnętrznej zabezpieczono prowadzenie jawnej i utajnionej (w systemie narodowym lub NATO) zewnętrznej komunikacji radiowej równocześnie: ze stacjami lądowymi, innymi jednostkami pływającymi oraz statkami powietrznymi (w relacjach telefonicznych, telegraficznych oraz poprzez transmisję danych). W przypadku systemu łączności wewnętrznej zabezpieczono komunikację pomiędzy poszczególnymi elementami struktury organizacyjnej okrętu (głównie pomiędzy stanowiskami bojowymi, jak również członkami załogi).

W ramach OZSŁ połączono i zsynchronizowano: typowe urządzenia łączności radiowej i satelitarnej, systemy antenowe, urządzenia komutacyjne (krosownice), interfejsy, modemy, urządzenia kryptograficzne, terminale, komputery sterujące rejestratory korespondencji radiowej, pulpity łączności, a także podsystem zasilania awaryjnego. Dzięki temu operator nawiązujący łączność nie musi wiedzieć, w jaki sposób to jest realizowane i przez którą radiostację, natomiast „widzi” jedynie wynośne pulpity łączności (z zestawionymi sieciami lub kierunkami łączności) lub terminale VT-Sec, które są umieszczone we wskazanych miejscach na okręcie.

Przy czym terminale VT-Sec są rozmieszczone przede wszystkim w Bojowym Centrum Informacyjnym i na mostku. Mogą one spełniać funkcję interkomu (zapewniającego łączność wewnętrzną z pozostałymi użytkownikami terminali VT-Sec), ale przede wszystkim pozwalają na:
- prowadzenie łączności fonicznej w trybie jawnym PLAIN - stosowanym np. podczas nawiązywania łączności (należą one wtedy do tzw. strefy „czarnej”);
- prowadzenie łączności fonicznej w trybie niejawnym SECURE - z wykorzystaniem urządzeń utajniania mowy, umożliwiających bezpieczne przekazywanie informacji (należą one wtedy do tzw. strefy „czerwonej”).
„Kormoran” ma rozbudowany system łączności satelitarnej. Na okręcie widać cztery systemy antenowe pod charakterystycznymi kopułami. Jeden z mniejszych należy do systemu łączności satelitarnej Sea Tel firmy Cobham (pracujący w paśmie Ku). Na razie jednak nie ujawniono, jaki typ urządzenia został zastosowany. Prawdopodobnie jest to zestaw Sea Tel 6012 VSAT z anteną stabilizowaną w trzech osiach. Dwie większe kopuły kryją anteny systemu łączności satelitarnej firmy ORBIT.

Okrętowy system łączności wewnętrznej służy do zestawiania łączności pomiędzy stanowiskami bojowymi (komunikacja z poszczególnymi stacjami abonenckimi odbywa się poprzez sieć Ethernet), do wydawania komend, jak również do ogłaszania komunikatów wewnątrz okrętu i na pokładach otwartych.

Standardowo można w nim wyróżnić cztery podsystemy:
- podsystem łączności dwukierunkowej głośnomówiącej i bezprzewodowej;
- podsystem rozgłośni ogólnookrętowej i alarmów;
- podsystem telefonów bezbateryjnych;
- podsystem łączności telefonicznej.
Jak na razie zakłada się, że niszczyciel min osiągnie pełną gotowość operacyjną w 2018 r. Ambicją załogi jest, by jeszcze w tym roku okręt wziął udział w działaniach w ramach ćwiczenia sił przeciwminowych, organizowanego przez NATO.










Raff33
Wróbel II kalibru 23 mm to nic nie warte , tych czasach potrzebne jest wyrzutna rakiet a nie człowiek w środku i strzela w tym . Staroświecki pomysł z drugiej wojny światowej . Statek nic nie warty tych czasach .
Rezerwista
Okręt jak już coś .... Zażalenia proszę składać do był min obr Siemoniaka za jego czasów powstał ten projekt
Działkami lepiej się ostrzeliwuje cele bardzo nisko latające. Nwm jak się sprawuje Wróbel bo go nie znam, ale działka 23 z radarem kierunkowym i systemem naprowadzania powinny dawać sobie radę. Zawsze można się pokusić o instalację wierzyczki z piorunami, ale to już zależy od miejsca. To nie jest okręt to walki.
piotrek
Za moich czasów trałowce stacjonowały na Helu. Kormoran wygląda fajnie ale brakuje dobrego uzbrojenia. Dwa karabiny maszynowe i jedno działko to stanowczo za mało. Współczuję załodze która miałaby pływać podczas warunków bojowych bo praktycznie okręt od razy poszedł by na dno. Pozdrowionka dla wszystkich którzy służyli na Helu.
Lutt
Trzeba postawić na szkolenie strzeleckie obsługi wkm 12,7, wtedy żadna rakieta nie będzie nam straszna.
Willgraf
taaa ....okręcik jak na ciepłe morza. Ciekaw jestem jak ten cały ekwipunek zamontowany bezpośrednio na pokładzie przetrwa oblodzenia w grudniu styczniu,lutym na Bałtyku ? .... jaki system usuwania oblodzenia z tego sprzętu ma ten okręt ?
Harry
Bardzo słuszna uwaga. Co się tylko da powinno być umieszczone w takim miejscu, aby na jego stan nie miało wpływu otoczenie, klimat itd. Urządzenia powinny być zatem tak umieszczone na okręcie, aby marynarze jak najkrócej przebywali na pokładzie nieosłonięci przed warunkami pogodowymi. Zadania byłyby lepiej staranniej wykonywane.
CB
Nie martw się, przetrwa. Praktycznie wszystkie kraje basenów morza Bałtyckiego i morza Północnego mają od dziesiątków lat okręty tego typu i działają. Nasze też. A kutry, trawlery itp. które mają też masę sprzętu na pokładach, działają w jeszcze bardziej ekstremalnych warunkach. Myślisz, że mają systemy antyoblodzeniowe? :O
Ja
Po co odladzanie? Ten caly sprzet na pokladzie służy do jednego celu czyli wsadzenia do wody I płyniecia z tym wtedy Lód odpadnie
kokon_kk
Jest to niewątpliwie okręt najwyższej klasy, ale jak rozumiem wymagający ochrony innych okrętów bojowych wyposażonych w odpowiednie uzbrojenie.
Ja
Tak jeśli oddali sie od brzegu to razem z Pulaskim albo czyms podobnym I raczej bdz pływać raZem z okrętami NATO
Pablo
a co on taki poklepany? przecież blacharzy to mamy akurat najlepszych na świecie?
Ja
To taki umyślny efekt. Każdy okret na pofaldowana blache to standard
Mariusz
Niszczyciel min „Kormoran” nie posiada radarów wykrywania celów powietrznych, a jedynie system obserwacji nawodnej.....czyli po co im te Gromy. Jak naocznie stwierdzą potrzebę ich użycia to będzie już za późno raczej. I taka dygresja na koniec dla Tych co uważają że ten okręt nie potrzebuje większych możliwości samoobrony bo inne okręty będą to osłaniać....a co z dotarciem na misję albo manewry NATO. Amerykanie będą przysyłać niszczyciel do eskorty by po drodze nic mu się nie stało?!
Boczek
Po to miały być Mieczniki - wszystko było w miarę przemyślane i spójne. Na manewry dotrze spoko sam.
LOL
A co może mu się stać w drodze na misję, lub manewry?
Ja
Jeśli będzie trzeba go wysłać do działań bojowych na zatokę perska na przykład to popłynie w konwoju np z Pułaskim ktory ma artylerię i rakiety przeciwokrętowe. W drodze na manewry zagroża mu I tak tylko co najwyżej piraci w łódkach (po to sa te kaemy na burtach)
realista
Co jest lepsze dla bezpieczenstwa Polski w pierwszej kolejności 3xniszczyciel min?Czy jeden niszczyciel rakietowy z prawdziwego zdarzenia i 1 niszczyciel min ewentualnie?
LOL
A co mieli byśmy tym niszczycielem rakietowym robić? Jakie zadania miał by realizować, i w jaki sposób wypełnił by powstająca lukę w zdolnościach przeciwminowych, na którą kormorany są odpowiedzą?
ROBERT
Odpowiadam : 3 x NDR, 3 x dywizjon śmigłowców morskich wielozadaniowych do działań ZOP (torpedy), ZON (rakiety). 3 x dywizjon opl NAREW z CAMM-ER. (dla baz morskich, SD i NDR).
Ja
Na cholere niszczyciel rakietowy? Jest aktualnie niepotrzebny.
bubu
wolałbym podziwiać jakąś korwetę rakietową lub potężny niszczyciel z camm-er (a nie niszczyciel min)
Ja
Za co chcesz go budować?
Tom
Kto by pomyslal ze PL jest w stanie taki super dobrze wyposazony okret wyprodukowac? Do tego co ma robic jest prawie idealny - trzeba by bylo dlugo szukac wad. Jesli chodzi o dzialka i karabiny to to jest malo znaczace - ten okret ma walczyc z minami a nie z wrogimi okretami / samolatami. Widac ze PL ma duzo doswiadczenie w tej klasie. Moze level 2 to bedzie ponowna proba corvety? Moze uda sie te male okrety sprzedac do innych krajow NATO?
kim1
Kto Ci miny tu postawi? Myślisz, że rosyjska flota sobie tu przypłynie i powie ok stawiamy wam tu pole minowe? Oni nie będą się bawić w jakieś pomysły z minami rodem, z II W.Ś. Wystrzelą Iskandery i Kalibry. My co? Wyślemy Kormorana? Taki okręt jest potrzebny ale w dalszej kolejności. Pierwsze powinny być 2-3 nowoczesne fregaty rakietowe, później okręty podwodne i dalej co tam innego dla MW potrzeba.
Ja
Kormoran może też stawiać Miny. Dwie miny za jakieś grosze sa w stanie zatopić niszczyciel
skiud
Bardzo mi się podoba. Widać dobrą inżynierską robotę. Kompleksowo wyposażony do swoich zadań. Co do uzbrojenia, do tych wszystkich jękadeł dla których jest za słabe. ŻADEN NISZCZYCIEL MIN na zachodzie, wschodzie, północy i południu nie jest uzbrojony w wyrzutnie pocisków przeciwokrętowych, przeciwlotniczych średniego zasięgu, wyrzutnie torped i dział powyżej kalibru 40mm. Bo jak sama nazwa wskazuje służy do niszczenia min, a nie wszystkiego innego.
wersaa
Wszystkie inne "normalne" floty na całym świecie mają okręty osłony do tego typu "niszczycieli". Jak wiadomo nasza MW takich okrętów nie posiada zatem całkowicie zasadne jest pytanie o ich przeżywalność a zo za tym idzie uzbrojenie. No ale do niektórych to nie dociera prawda?
Ja
Nie mamy? A Pułaski I Kościuszko ze swoimi działami i wyrzutnia rakiet przeciwokrętowych.
Thorsten
Systemy wykrywania, zwalczania min ok, ale uzbrojenie to faktycznie bardzo skromne... chyba będzie musiał pływać z eskortą ;-)
Pograbek
czyli z czym ze tak zapytam?
Ja
Ten okret jeśli zapuści sie Dalej od brzegu to towarzyszac takiemu Pułaskiemu i pilnujac żeby nie wszedł na minę. Polska ma ok 20 okrętów minerskich I stawiaczy min. W Sam raz żeby zaminować np drogę żeglugowa wychodzaca z kaliningradu
greg
No to mamy niezłą motorówkę,ta niemoc naszych decydentów dotycząca zakupu efektywnie uzbrojonych srodków walki jest ma charakter satyryczny.No cóż,a Antoni robi dużo nic nie znaczącego zamieszania zeby ratować swoją głowę.To się chyba nazywa działania pozorowane w celu zmylenia przeciwnika-czyli niestety opini publicznej.
Ile razy mam wszystkim pisać że ten okręt był budowany za platformy to nie Antoni go zbudował tylko Siemoniak
ryszard
Działko M61 Vulcan x 2 brakuje na pomoście, nic nie piszą o rakietach,nawet krótkich jak ,grom,,
Polish Pride
Już trzy kraje chcą zakupić Kormorana II . Co prawda z innym wyposażeniem ale podstawowe wyposażenie bez zmian . Jak znam życie to ryży jak dojdzie do władzy to stocznie zamknie , Niemcom sprzeda dokumenty do produkcji , a Polskich stoczniowców wyśle tam do pracy , a następnie kupimy jeszcze jeden za to wszystko co im oddamy .
Podporucznik rezerwy wojsk kwatermistrzowskich
Bez zestrzeliwania nadlatujących rakiet żywot okrętu będzie krótki, ale to można uzupełnić łatwo później. Zabrakło mi informacji i zdjęć o komforcie pracy i wypoczynku załogi. Kajuty chyba jednoosobowe dla każdego?
MARIUSZ
A Rosjanie w tym tonżu budują "mały" okręt rakietowy projektu 22800 Karakurt...
Anty 50 C-cali przed 500+
czy Tam na dziobie do tej armatki 23mm to dalej taki Gustlik potrzebny? i Gromy do obrony jak na mor-ach klasy "orkan"?
Anty C-cal przed 500+
...ale jak I miny stawia to czy potrzebnie marnowali papier i czas IU MON dla Czapli? Jak nie ma miedzi dupa siedzi - nasza liga to Belgia (ma F-16 starszego Block ale i fregaty standartowego NATO uzbrojenia-odkupione) Kolumbia (kupuje z Mielca min. bieda s70i, na BHawki podwiesili spike) Senegal (ma takie heli - gromy uderzeniowe jak My-Milki-24, ale z trzy wyremontowane w WZL-1...
Piotr
Gdzie jest obiecane działko 35mm zamiast wróbla ??
ROBERT
w badaniach
Brawo Władza
Brawo PiS, wreszcie ktoś dba o polskie interesy morskie. Pokazali niedowiarkom, że państwowe stocznie da się uratować i mogą produkować świetny, polski sprzęt.
Stoczniowiec
To nie brawo PIS a PO-PSL bo to oni podpisali kontrakt oraz nie uratuje to stoczni państwowych bo okręt zbudowała stocznia prywatna.
Extern
Akurat kontrakt na Kormorana to jeszcze za POPSL został podpisany. AM jak na razie tylko drobnicę zamawia.Nawet sporo tej drobnicy, ale to jednak drobnica.
uze
Matko jaka propaganda sukcesu. Przecież ten okręt nawet uwzględniając wyposażenie specjalistyczne jakie ma (bo ze względu na uzbrojenie to byłby tylko ciężarem który trzeba ochraniać) nadaje się co najwyżej do rozminowania wejścia do portu macierzystego. Przy prędkości maksymalnej 15w, to nie nadąży za żadnym zespołem floty, której miałby rozminować przejście.
Rezerwista
Ło matko , ten cud techniki - ja tam się nie znam ....Ale został zatwierdzony za poprzednich'' rządów'' więc pretensje do .... To niszczyciel min, geniuszu, nie korweta czy niszczyciel albo lotniskowiec ... Dziwne, bo lotniskowce są ochraniane przez okręty nawodne jak i podwodne przynajmniej w US NAVY...
Boczek
"...to nie nadąży za żadnym zespołem floty, której miałby rozminować przejście...." Powolutku przebija się do świadomości po co miały być Czaple?
KOSA
Ale szkoda , że tylko gadają o decyzjach o kolejne dwa.. a umów nie podpisano. Znowu MM obiecuje... ? MM Minister Maciarewicz. A uwagi słuszne o uzbrojeniu . Tryton Powinien tu już być, i Te nasze Gromy odpalane z ręcznych wyrzutni na okręcie ... brak słów. ( FASTA-4M takie cóś powinno być jako minimum). Ale ogólnie patrząc okręt jest super i szkoda , że nie ma umów na kolejne. Wbrew pozorom okręty niezwykle potrzebne. KOSA
Rezerwista
Jak zwykle wszystkiemu winny Macierewicz ... A to projekt jeszcze za Siemoniaka .....
rowi
dzleczego my tolerujemy tandete? po co nowoczesny okret, ktory nie moze sie bronic? przeciez te zabawki szykuje sie na czas wojny, a nie pokoju...armata wrobel II (z operatorem w srodku - dno....), a gdzie armata morska? no i ta bazdura z pociskami grom/piorum odpalanymi przez marynarzy z wyrzutni - jeszcze raz zapytam - dlaczego tolerujemy tandete? czy nie mozna bylo kupic armaty, skoro te nasza testuje sie w nieskonczonsc? co z tego, ze ma byc polsla mysl (...na licencji), po co odkrywac Ameryke od nowa? po co wymyslac kolo wlasnym sumptem? kiedy zaczniemy myslec?
Boczek
Od obrony tego okrętu miał być Miecznik. Tak się robi i tak robią wszyscy - 1 do 2 razy od 20 do 40 mm plus MANPADS, bo jest to rozwiązanie optymalne. Ale komuś to przeszkadzało. To pokazuje stan rozkładu naszej armii, gdzie dowódcy bez kręgosłupa i honoru biernie godzą się na rozwiązania już dziś skazujące żołnierzy i marynarzy na bezsensowną śmierć.
ROBERT
Stacja SHL-101T , a nie SHL-100 pod kilem.
optymista
Lepszy rydz niż nic.