Przemysł Zbrojeniowy
KenBIT staje do walki o kontrakt na BMS ROSOMAK


Bell 407GXP – fot. Bell Helicopter 
KMW-1 TEJA thermal camera | photo: PCO S.A. 



173 Airborne Brigade Lviv 
MSBS
Polska firma KenBIT z systemem BMS HEKTOR została zakwalifikowana przez Inspektorat Uzbrojenia do udziału w postępowaniu, które ma wskazać dostawcę Systemu Zarządzania Walką Szczebla Batalionu (kryptonim „ROSOMAK BMS”) dla Sił Zbrojnych RP.
- HEKTOR to system zaliczany na zachodzie do klasy BMS (Battlefield Management System) - systemów zarządzania polem walki. Wspiera on działania bojowe do szczebla batalionu włącznie. Jest to jednak system rozwojowy, który po zastosowaniu odpowiednich środków łączności można bez problemu przystosować dla potrzeb wyższych szczebli dowodzenia.
BMS HEKTOR to system całkowicie mobilny, zapewniający osobom funkcyjnym różnych szczebli dowodzenia możliwość:
- kierowania działaniami wojsk;
- tworzenia świadomości sytuacyjnej na polu walki – m.in. poprzez zobrazowanie położenia wojsk własnych i nieprzyjaciela na mapie cyfrowej.
Zgodnie z założeniem BMS HEKTOR jest przygotowany dla potrzeb Wojsk Lądowych i Wojsk Specjalnych mając przy tym możliwość wymiany informacji sojuszniczych. Oprogramowanie HEKTORa zostało już wdrożone i jest użytkowane w dwóch pododdziałach Sił Zbrojnych RP.
System przy tym jest na bieżąco uaktualniany zgodnie z najnowszymi standardami NATO. Możliwości BMS HEKTOR są bowiem cały czas weryfikowane w praktyce podczas takich wydarzeń, jak: ćwiczenia Combined Endeavor, CWIX (Coalition Warrior Interoperability eXploration) i warsztaty ASTER. Pozwala to m.in. na przeprowadzanie wiarygodnych testów z wieloma partnerami oraz na potwierdzenie prawidłowej implementacji standardów wymiany informacji taktycznych.
Dzięki temu już wiadomo, że BMS HEKTOR może bez większych problemów współpracować z innymi systemami sojuszniczymi za pośrednictwem protokołów: MIP (Multilateral Interoperability Programme), NFFI (NATO Friendly Force Information), NVG (NATO Vector Graphics), MS (Web Map Server) i XMPP (Extensible Messaging and Presence Protocol). Jak podkreślają przedstawiciele producenta, zdecydowana większość testów BMS HEKTOR zakończyła się wynikiem pozytywnym.
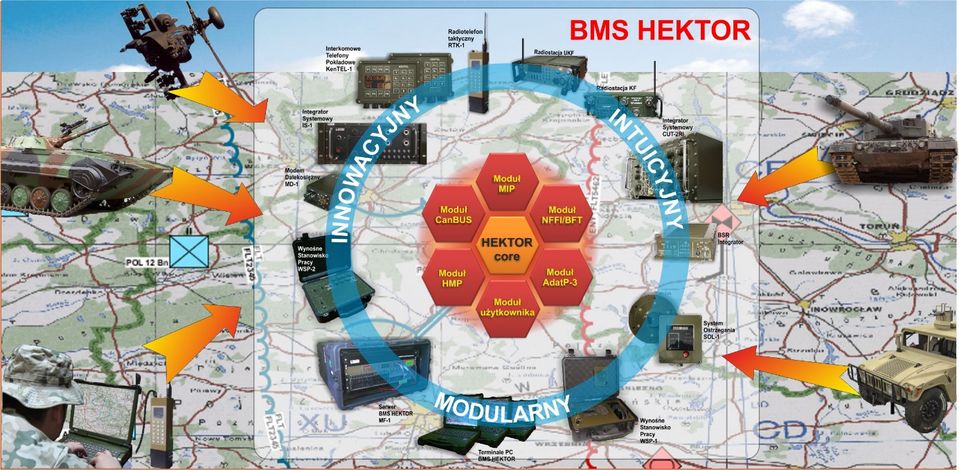
Z czego składa się BMS HEKTOR?
W BMS HEKTOR można wydzielić pięć głównych elementów składowych:
- podsystem planowania i zarządzania pozwalający na lokalne i zdalne konfigurowanie systemu oraz jego monitorowanie;
- podsystem łączności pozwalający: na wykorzystanie wszystkich, aktualnie dostępnych mediów łączności, na tworzenie „przęseł” radiowych KF/UKF pomiędzy abonentami cyfrowymi i analogowymi sieci telekomunikacyjnych, na realizowanie połączeń z abonentami podsystemu JRS (Jednokanałowego Radiodostępu Simpleksowego) i WRS (Wielokanałowego Radiodostępu Simpleksowego) UKF oraz na realizowanie połączeń fonicznych i wymianę danych pomiędzy abonentami przewodowymi (STORCZYK, ISDN, H. 323) i abonentami radiowymi KF i UKF;
- podsystem wymiany danych - pozwalający na tworzenie węzłów komunikacyjnych z poszczególnych Wozów Dowodzenia ugrupowania bojowego dając im możliwość: automatycznego retransmitowania informacji od nadawcy do odbiorcy (poprzez wszystkie media), automatycznej wymiany danych z wyszukiwaniem dróg dostarczenia wiadomości we wszystkich mediach łączności oraz implementacji mechanizmów wymiany wiadomości MEM (Message Exchange Mechanism) i wymiany danych DEM (Data Exchange Mechanism) programu MIP;
- podsystem ochrony kryptograficznej (POK) - pozwalający na bezpieczną wymianę informacji niejawnych o klauzuli „Zastrzeżone” i uwierzytelnienie użytkowników podczas przekazywania poza strefy ochronne.
- podsystem dowodzenia, kierowania i monitorowania.
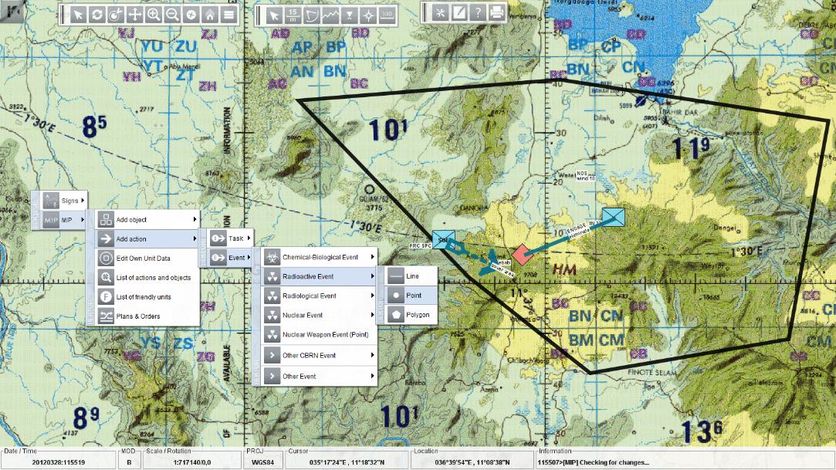
Sam podsystem dowodzenia, kierowania i monitorowania pozwala na:
- gromadzenie informacji i dynamiczne zobrazowanie sytuacji taktycznej,
- pracę graficzną na wielowarstwowej mapie cyfrowej,
- zobrazowanie sytuacji taktycznej na mapie cyfrowej wraz z aktualną lokalizacją wozu dowodzenia opartą na systemie GPS,
- zobrazowanie informacji z rozpoznania na mapach cyfrowych zautomatyzowanych miejsc pracy osób funkcyjnych;
- pozycjonowanie elementów ugrupowania bojowego dla potrzeb zobrazowania sytuacji bojowej w czasie rzeczywistym,
- autonomiczną realizację funkcji dowodzenia we wszystkich fazach działań taktycznych od pojedynczego żołnierza do szczebla Dywizji ZT,
- dowodzenie „dwa szczeble w dół”;
- przejęcie lub przekazania dowodzenia przez inną osobę funkcyjną;
- separację funkcji dowodzenia i łączności (dowódca nie jest dzięki temu absorbowany sprawami łączności);
- autoryzowaną wymianę dokumentów bojowych;
- przekazywanie i przygotowywanie (praca grupowa) dokumentów dowodzenia;
- współpracę z systemem SZAFRAN ZT (zasilanie informacyjne baz danych ZT);
- przekazywanie alarmów NBC i informacji krytycznych;
- planowanie działań taktycznych;
- wymianę informacji logistycznych;
- przesyłanie obrazów;
- realizowanie zautomatyzowanych funkcji rozpoznania ogólnowojskowego (meldowanie o wykrytych celach);
- kierowanie informacji do systemów kierowania ogniem (np. TOPAZ, AZALIA, LOARA);
- realizowanie zautomatyzowanych funkcje rozpoznania inżynieryjnego (gromadzenie informacji oraz meldowanie),
- kierowania walką elektroniczną (np. na współpracę z systemami PRZEBIŚNIEG, PROCJON, BREŃ).
W skład BMS HEKTOR wchodzi odpowiednio dobrana infrastruktura teleinformatyczną (zestaw pokładowych urządzeń teleinformatycznych zapewniających działanie systemu na pojazdach – np. na KTO ROSOMAK) oraz oprogramowanie w wersjach: na terminale pokładowe oraz osobiste terminale komputerowe/PDA (Personal Digital Assistant) pojedynczego żołnierza.
Zarówno oprogramowanie, jak i urządzenia teleinformatyczne BMS Hektor zapewniają:
- współpracę z urządzeniami nawigacji pokładowej oraz różnej klasy urządzeniami łączności (szerokopasmowymi radiostacjami pokładowymi IP oraz radiostacjami osobistymi IP, wąskopasmowymi radiostacjami pokładowymi KF i UKF oraz taktycznymi terminalami satelitarnymi);
- współpracę z innymi elementami polowego systemu teleinformatycznego eksploatowanymi w SZ RP: Cyfrowym Systemem Łączności Radioliniowo-Przewodowej ZT STORCZYK 2000, ZWT KTSAwp3 JAŚMIN, PPTS (Przenośno-Przewoźnym Terminalem Satelitarnym) FIKUS;
- interoperacyjność z innymi jednostkami NATO w ramach wymiany informacji.
Oprogramowanie Systemu Zarządzania Walką BMS HEKTOR
Oprogramowanie BMS HEKTOR instalowane na komputerach klasy PC, serwerach oraz osobistych terminalach komputerowych klasy PDA oparto o rzadko stosowane w polskim wojsku technologie: język programowania nowej generacji Java oraz wiele innych komponentów, takich jak: serwer aplikacyjny JBoss , technologia EJB, Framework Hibernate, JAAS, Oracle.
BMS HEKTOR dwa zasadnicze moduły:
- moduł (oprogramowanie) BMS systemu zarządzania polem walki;
- moduł (oprogramowanie) BFT (Blue Force Tracking) monitorowania wojsk własnych.
Oprogramowanie BFT jest przeznaczone do współpracy z bojowym systemem identyfikacji oraz informacji i pozwala na monitorowanie położenia wojsk własnych. Moduł BFT jest wykonany w sposób umożliwiający jego instalację niezależnie od pełnej funkcjonalności oprogramowania SZW HEKTOR i jest realizowany w dwóch w wersjach: na terminale pokładowe oraz osobiste terminale komputerowe.
Oprogramowanie BMS dzięki modułowej budowie pozwala na:
- tworzenie wyspecjalizowanych stanowisk pracy o różnym zakresie odpowiedzialności;
- dodawanie nowych funkcjonalności, zaspokajając rosnące potrzeby w miarę pojawiania się nowych standardów wymiany informacji.
System może pracować w trybie samodzielnym i rozproszonym – co znacząco zwiększa jego wydajność przez uruchamianie poszczególnych usług/modułów systemu (MIP, serwer map, itd.) na oddzielnych komputerach obiektu. Oprogramowania BMS posiada interfejs użytkownika w języku polskim/angielskim. Istnieje dodatkowo możliwość jego obsługi z użyciem interfejsu dotykowego zarówno w warunkach dziennych, jak i nocnych.
W module BMS zaimplementowano najnowsze mechanizmy NFFI oraz unormowania programu MIP (w tym mechanizm MIP DEM Baseline 3.0 i 3.1). Pozwala to na tworzenie hierarchicznej struktury informacyjnej z zastosowaniem usług katalogowych zgodnych z LDAP (Lightweight Directory Access Protocol), obejmującej ugrupowanie bojowe i zasoby sieci - zdefiniowaną w usłudze Battlefield Directory - zgodną z porozumieniem STANAG 4644 oraz ACP 133(D).
Funkcje realizowane przez oprogramowanie BMS zapewniają: wsparcie działań pododdziałów na szczeblu taktycznym (np. batalionu), rejestrowanie danych związanych z prowadzonymi działaniami bojowymi oraz zapis rozmów prowadzonych we wszystkich relacjach łączności zewnętrznej i wewnętrznej.
Architektura oprogramowania BMS HEKTOR
Oprogramowanie BMS HEKTOR posiada architekturę typu „klient-serwer”. Składa się ono z tzw. jądra/silnika aplikacji (core) oraz modułów, które pozwalają na rozbudowę i dostosowanie funkcji programu do wymagań stanowiska pracy, na którym mają być użytkowane.
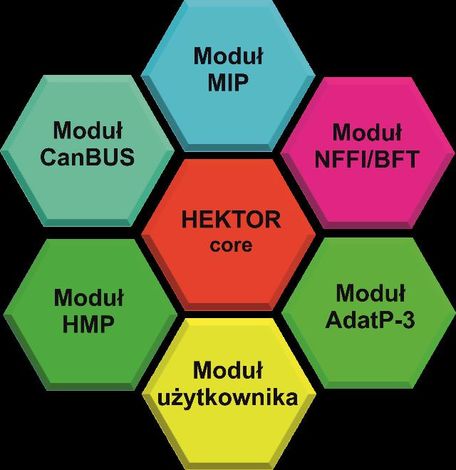
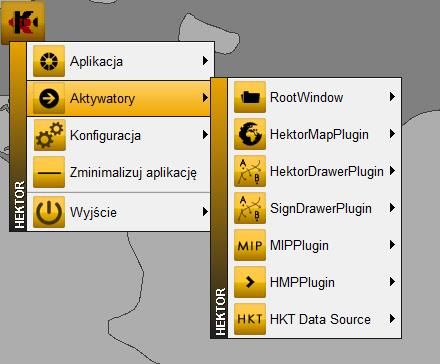
Silnik aplikacji odpowiada za konfigurację ogólną systemu, autoryzację użytkowników oraz zapewnia integrację dołączanych w zależności od potrzeb następujących modułów:
- Moduł ADat-P3 (Allied Data Publication No 3) - obsługuje wiadomości przekazywane przy użyciu sformalizowanego języka dowodzenia, automatyzuje wymianę między innymi: raportów o sytuacji wojsk własnych OWNSITREP (Own Land Forces Situation Report) i przeciwnika ENSITREP (Ennemi Situation Report) oraz wezwań wsparcia ogniowego CFF (call for fire);
- Moduł „CANBUS” – zbiera informację z urządzeń oraz sensorów pojazdu, takie jak: GPS, busola, czujniki silnika, czujniki promieniowania laserowego, itp.;
- Moduł GW HMP (Gateway Hektor Messaging Protocol) - protokół do wymiany informacji w sieciach o małych przepustowościach. Realizuje wymianę informacji wykorzystując mechanizm RRM (Radio Replication Mechanizm) dla interfejsu radiowego. W połączeniu z konwerterem TIC (Tactical Information Converter) umożliwia wymianę informacji z modelu JC3IEDEM na poziomie taktycznym wykorzystując łączność radiową;
- Moduł GW MIP DEM 3.0 (Gateway Multilateral Interoperability Programme) - zapewnia interoperacyjność z systemami tej samej klasy poprzez protokół DEM (Data Exchange Mechanism) w wersji 3.0;
- Moduł GW MIP DEM 3.1 - zapewnia interoperacyjność z systemami tej samej klasy poprzez protokół DEM w wersji 3.1;
- Moduł GW MIP ADEM 1.0.6 - zapewnienia interoperacyjność z systemami tej samej klasy poprzez protokół ADEM (Alternate Data Exchange Mechanism) w wersji 1.0.6;
- Moduł HCHAT – zapewnia wymianę wiadomości tekstowych wykorzystując protokół XMPP;
- Moduł LDAP – służy do przechowywania hierarchicznej struktury informacyjnej obejmującej: ugrupowanie bojowe, zasoby sieci oraz dane do autoryzacji użytkowników;
- Moduł MIP 3.0 – interfejs użytkownika ze zobrazowaniem sytuacji taktycznej przechowywanej w bazie danych JC3IEDM (Joint Consultation, Command and Control Information Exchange Data Model) w wersji 3.0;
- Moduł MIP 3.1 – interfejs użytkownika ze zobrazowaniem sytuacji taktycznej przechowywanej w bazie danych JC3IEDM w wersji 3.1;
- Moduł NFFI - służy do przekazywania informacji o położeniu wojsk własnych i sojuszniczych. Zapewnienia interoperacyjność z systemami tej samej klasy poprzez wymianę informacji poprzez protokoły: IP1, IP2, SIP3;
- Moduł NVG – obsługuje format danych standardu NVG (NATO Vector Graphics). W ramach systemu jest wykorzystywany do wymiany informacji o sytuacji taktycznej pola walki oraz tworzenie POSO (Połączonego Obrazu Sytuacji Operacyjnej);
- Moduł „PODKŁADY MAP” – zapewnia wyświetlanie zadanych map i obsługiwanie źródeł danych: pliki CADRG, pliki DTED, pliki SHP, pliki S57, pliki GeoTIFF, serwer WMS, serwer WFS;
- Moduł „ZNAKI TAKTYCZNE” – zapewnia wizualizację znaków taktycznych na mapach cyfrowych (punktowych oraz obszarowych). Wtyczka wspiera standard APP-6A rozszerzone o znaki MIP;
- Moduł „SOL” – pozwala na zobrazowanie informacji dostarczanej przez system SOL (System sygnalizacji o opromieniowaniu laserowym);
- Moduł „OBRA” - pozwala na wyświetlenie stanu systemu samoosłony pojazdu OBRA (zobrazowanie stanu poszczególnych głowic systemu oraz informacji o kierunku opromieniowania).
Interoperacyjność z innymi systemami
Według spółki KenBIT oprogramowanie wykorzystywane przez BMS HEKTOR zapewnia funkcjonowanie z wykorzystaniem wszystkich obowiązujących w NATO standardów i protokołów komunikacyjnych. Pozwala ono na:
- zasilanie informacyjne procesu tworzenia połączonego obrazu sytuacji operacyjnej (COP/JCOP) przy użyciu protokołu JIPS (JCOP Information Product Service);
- mapowania danych wg standardu zapisu danych w formacie NVG (NATO Vector Graphics);
- udostępnienia danych w formacie NVG JPS.
Oprogramowanie BMS HEKTOR zapewnia zobrazowanie sytuacji taktycznej, w tym: tras przemieszczania, aktualnego położenia wojsk własnych oraz obiektów taktycznych znajdujących się w rejonie działań za pomocą znaków według wojskowego standardu APP-6(A) oraz APP-6(B) na podkładzie map cyfrowych (wektorowych i rastrowych).
Wewnątrz tego oprogramowania zaimplementowano ustalenia dokumentu STANAG 5500 (ADatP-3 Baseline 11–14) - w tym zapewniono automatyczne generowanie, przesyłanie, przetwarzanie następujących komunikatów: OWNSITEREP, ENSITREP, FM.CFF (Fire Mission - Call for Fire), INTREP oraz komunikatów o skażeniach: CBRN4, CBRN3 i CBRN5 (Chemical, Biological, Radiological and Nuclear).
Dzięki temu system BMS HEKTOR pozwala m.in. na:
- wezwanie nieuzbrojonego lub uzbrojonego transportu medycznego - komunikaty MEDEVAC (Medical Evacuation) oraz CASEVAC (Casualty Evacuation),
- wyznaczanie stref Fresnela (obszaru propagowania energii sygnału radiowego) wykorzystując profil terenu DTED (Digital Terrain Elevation Data);
- wyliczenie wschodów/zachodów słońca/księżyca dla wskazanego punktu na ziemi;
- prowadzenia elektronicznego dziennika działań bojowych.
Infrastruktura teleinformatyczna BMS HEKTOR
W skład BMS HEKTOR wchodzi zestaw dedykowanych dla transporterów opancerzonych (np. KTO Rosomak) urządzeń teleinformatycznych, które zapewniają realizację wymaganych funkcji łączności i dowodzenia. Z wyposażonych w ten sposób pojazdów tworzy się tzw. obiekty systemu SZW BMS HEKTOR.
W zależności od szczebla i realizowanych zadań występować mogą różne ich wersje, które w zależności od szczebla dowodzenia mogą być wyposażone w stanowiska pracy dla dowódców/zastępców batalionu i kompanii, dowódców plutonu i drużyny, szefa sztabu i osób funkcyjnych sztabu oraz dowódcy załogi. Stanowiska te pozwalają na wymianę informacji wewnątrz wozu oraz z: przełożonym, podwładnymi i pododdziałami współdziałającymi zarówno podczas postoju jak i w ruchu. Istnieje również możliwość pracy na zewnątrz pojazdu, z wykorzystaniem wynośnych stanowisk pracy.
Za każdym razem zamontowane na pojazdach środki łączności i informatyki, zapewniają bezpośrednią komunikację i transmisję danych zabezpieczoną kryptograficznie w ramach międzyszczeblowych relacji systemu dowodzenia, jak również podłączenie do polowego systemu teleinformatycznego.
Każdy obiekt systemu BMS HEKTOR (w zależności od szczebla zastosowania) zapewnia możliwość pracy w bezprzewodowych sieciach IP o małej i dużej przepływności zbudowanych z wykorzystaniem taktycznych radiostacji wąskopasmowych, szerokopasmowych oraz taktycznych terminali satelitarnych. Urządzenia stanowiące elementy systemu spełniają wymagania norm NO-06-A101 i NO-06-A103 dla grup N.11-O-II-A7, a urządzenia wynośne systemu - wymagania dla grupy N.14-O-II-A.
Zastosowany w każdym obiekcie systemu BMS HEKTOR cyfrowy system łączności wewnętrznej pozwala na:
- realizację połączeń głosowych, transmisję danych oraz łączność głosową VoIP wewnątrz pojazdu obiektu i niejawnych połączeń pomiędzy obiektami ugrupowania bojowego batalionu oraz obiektami batalionów współdziałających,
- sterowanie pracą pokładowych środków radiowych,
- stały odbiór i wywołanie sygnałów alarmowych oraz innych pilnych informacji, niezależnie od wybranego trybu pracy na terminalach pokładowych.
Architektura systemu BMS Hektor pozwala na szybką zmianę funkcji wozu dowodzenia (1-2 szczebli dowodzenia), zarówno poprzez rekonfigurację oprogramowania jak i poprzez odpowiedzenie doposażenie pojazdu w sprzęt łączności. Praca osoby funkcyjnej na innym stanowisku pracy w ramach danej platformy polega jedynie na zmianie uprawnień dostępowych do BMS HEKTOR poprzez użycie mechanizmów autoryzacji użytkownika. Przy czym struktura oprogramowania systemu umożliwia zmianę i uaktualnienie poszczególnych modułów bez konieczności reinstalacji całego oprogramowania.
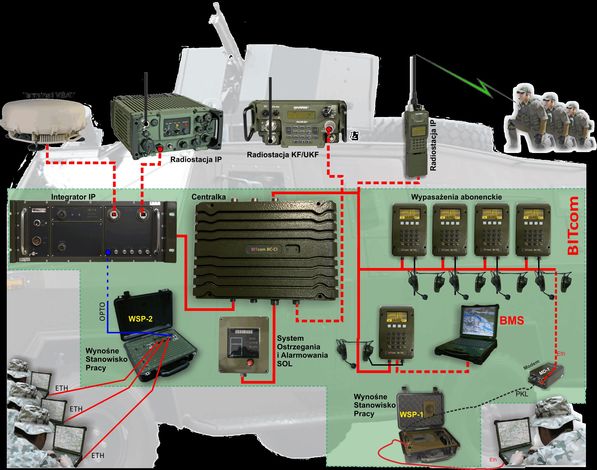
Pokładowe środki łączności
Każdy obiekt BMS HEKTOR jest wyposażony w następujące środki łączności pokładowej:
- 1-2 radiostacje VHF (ilość zależy od wersji);
- 1 radiostacja HF;
- 1 szerokopasmowa radiostacja pokładowa IP,
- 1 szerokopasmowa radiostacja osobista IP jako stacja bazowa;
- 1 moduł WLAN (Wireless Local Area Network).
Pojazdy BMS HEKTOR są dodatkowo wyposażone w autonomiczne urządzenie nawigacyjne pozwalające na pracę w ruchu i na postoju, w skład którego wchodzi inercyjny system nawigacji (INS) w pełni zintegrowany z zewnętrznym, wojskowym system GPS (dysponującym modułem SAASM).
Oprogramowanie BMS HEKTOR korzysta ze standardowych stosów protokołów TCP/IP (sieci szerokopasmowe) oraz UDP/IP (sieci wąskopasmowe) również w czasie transmisji radiowej. Z uwagi na trudne warunki pracy na szczeblu taktycznym i możliwe przerwy w łączności, oprogramowanie BMS zostało wyposażone w Radiowy Mechanizm Replikacyjny (RRM) zapewniający automatycznie, selektywne przesyłanie informacji, kompresję danych, nadawanie priorytetów oraz zapewnienie integralności danych. RRM umożliwia dzielenie informacji na segmenty oraz przesyłanie ich różnymi środkami łączności radiowej w celu optymalizacji czasu przesyłania informacji (uwzględnia przy tym wymianę informacji zgodnej z MIP DEM Baseline 3.0 i MIP ADEM Baseline 3.1).
Dla zapewnienia transmisji danych przez radiostację KF, podsystem łączności i informatyki systemu BMS HEKTOR ma możliwość pracy zgodnie ze standardem STANAG 5066 oraz STANAG 4538. Ponadto BMS HEKTOR posiada funkcję QoS (Quality of Service) działającą na poziomie aplikacji - stosującą hierarchizację ważności przesyłanych informacji poprzez nadanie poszczególnym danym oraz poszczególnym użytkownikom priorytetów.
BMS Hektor posiada możliwość współpracy z następującymi urządzeniami łączności:
- modułem WLAN - wykorzystywanym do budowy bezprzewodowych sieci komputerowych oraz tworzenia sieci lokalnych opartych na komunikacji radiowej WLAN;
- telefonem bezprzewodowym IP - wykorzystywanym do współpracy z modułem WLAN (wykorzystuje bezprzewodową komunikację w standardzie IEEE 802.11 b/g/n);
- terminalem pokładowym VoIP - wykorzystywanym do komunikacji wewnątrzpokładowej obiektu SZW HEKTOR oraz do komunikacji z korespondentami zewnętrznymi poprzez środki transmisyjne pojazdu;

- integratorem IP RED - umożliwiającym podłączenie i integrację urządzeń aktywnych za urządzeniem utajniającym (np. zestawy komputerowe stanowiska pracy, terminale VoIP, czujniki sensorów pojazdu, zestawy mikrofonowo-słuchawkowe osób funkcyjnych);
- integratorem IP BLACK - umożliwiającym podłączenie i integrację urządzeń aktywnych przed urządzeniem utajniającym (np. radiostacje szerokopasmowe, radiostacje wąskopasmowe, terminale satelitarne, moduły WLAN);

- Wynośnym Stanowiskiem Pracy WSP-1 - zewnętrznym, przenośnym terminalem komunikacyjnym umożliwiającym realizację przewodowej łączności oraz wymianę danych IP z pojazdem bazowym. Wraz z dołączonym terminalem PC zapewnia on pełen dostęp do usług wozu dowodzenia;
- Wynośnym Stanowiskiem Pracy WSP-2 - zewnętrznym, przenośnym urządzeniem pełniącym rolę routera lub switch’a. Jest on wykorzystywany do zabezpieczenia funkcjonowania oddalonych miejsc pracy, poprzez kabel polowy PKL 1x2 oraz polowy kabel światłowodowy. Umożliwia budowanie tymczasowych, lokalnych sieci transmisji danych (Ethernet) na polowych stanowiskach dowodzenia;
- szerokopasmową radiostacją pokładową IP, przeznaczoną do zabudowy na platformie mobilnej. Wykorzystuje ona modulacje szerokopasmowe oraz technologie związane z rozpraszaniem widma sygnału w dziedzinie częstotliwości, zapewniające maskowanie oraz współdzielenie pasma. Radiostacja taka pozwala na zorganizowanie systemu łączności radiowej zabezpieczając szerokopasmową wymianę danych od poziomu drużyny wzwyż oraz zapewniając dowódcom szczebla taktycznego dowodzenie i wymianę danych w ruchu i na postoju;
- komputerowym stanowiskiem pracy, którym może być: terminal komputerowy przeznaczony do instalacji na obiektach BMS HEKTOR (z możliwością wynoszenia poza obiekt) lub terminale osobiste do użycia przez żołnierzy spieszonych po opuszczeniu przedziału desantowego.

Podsystem ochrony kryptograficznej
Podsystem Ochrony Kryptograficznej (POK) jest rozwiązaniem sprzętowo - programowym zapewniającym kryptograficzną ochronę informacji niejawnych przekazywanych w Systemie Zarządzania Walką HEKTOR. Podsystem ten obejmuje:
- radiowe moduły kryptograficzne;
- stanowiska zarządzania kryptografią;
- nośniki danych kryptograficznych.
POK pozwala na bezpieczną wymianę informacji niejawnych o klauzuli „Zastrzeżone” i uwierzytelnienie użytkowników podczas przekazywania poza strefy ochronne. Podsystem ten posiada zdolność do zapewnienia bezpieczeństwa przetwarzanych informacji w środowisku teleinformatycznym w układzie narodowym i sojuszniczym poprzez zapewnienie możliwości implementacji algorytmów kryptograficznych dostarczonych przez krajowe lub sojusznicze organy bezpieczeństwa
Informacje zawarte w oprogramowaniu SZW HEKTOR są chronione przed nieuprawnionym ich odczytem, modyfikacją i zniszczeniem. Zapewniona jest przy tym poufność, integralność, dostępność, rozliczalność, autentyczność, niezawodność i niezaprzeczalność danych.
Artykuł opracowano na bazie materiałów KenBIT Sp. j.










priv
czy ma SCIP?
strzelec
a musi mieć?
Otek
Język programowania nowej generacji Java nie jest językiem bezpiecznym i efektywnym w działaniu. Jest językiem, który się nie sprawdził. Była to technologia bardzo modna 5 lat temu, która zawierała nowoczesne podejście do systemów rozproszonych. Systemy monitoringu i zarządzania infrastrukturą krytyczką pisane w Javie są obecnie przenoszone są na XML-a ze względu na standaryzację, wydajność i bezpieczeństwo.
Robertos
Ale się popisałeś wiedzą. XML jest sposobem zapisu danych oraz ich struktury, a nie żadnym językiem programowania.
kenszmelc
Patrząc na zdjęcia tego sprzętu to obawiam się, iż po zaimplementowaniu go w Rosomaku, straci on pływalność i nie będzie w nim miejsca dla desantu!!!
Bolo
Szkoda, że nie ma zdjęć terminali osobistych ;) bo pewnie ich nie ma. Ponadto nie widzę żadnego sensownego terminala, który mógłby być zamontowany w pojeździe. Interfejs oprogramowania też nie wydaje się aby był dostosowany do użycia w trakcie jazdy i z nałożonymi rękawicami. Śmiech na sali. Chwalą się jakimiś starociami a zwyczajnie nie mają czym. Trzeba mieć tupet. Kompleksowe rozwiązanie ;) na papierze ;D Tak, tak oni mają wszystko i na każdy ogłoszony przetarg hehe
ciekawy
odnośnie poprzednich pytań czy podobnie nie jest też z serwisem irysów, satelit dostarczonych np. do WS itp, itd.? czy w każdym przypadku sprzęt ten był należycie dostarczony i uruchamiony? jakie są oceny jego pracy w jednej dostarczonej serii i w różnych partiach dostaw - b.ciekawe?
ziz
jak uważacie czy to coś w połączeniu z wysiłkami byłych wpływowych oficerów DZ, IU i P6 mocno zaangażowanych w promowanie tego itd. ma szansę być SpW, także w kontekście dotychczasowych doświadczeń z tego typu twórczością?
Krak91
Do pytań poprzedników: jak przebiegało serwisowanie śmigłowcowego systemu rozpoznania? Czy to prawda, że kenbit nie podołała wyzwaniu zapewnienia sprawności wszystkich składników tego systemu?
żw
a co z ostatnimi przeszukankami itd.?
Marek
No i świetnie, ciekawe jak system polski prezentuje się na tle np. analogicznych zachodnich i rosyjskich syst. zarz. walką.
NIK
Dialog techniczny rozpoczeto w 2012. Przetarg w 2015. Kontrakt mial byc zamkniety w 1Q 2016.
aaa
w tego typu działalności trzeba zwracać uwagę zwłaszcza na: SOLIDNOŚĆ, JAKOŚĆ, TERMINOWOŚĆ i eliminację iluzji, że można robić poważne rzeczy np. w teczce, dziupli, mieszkaniu, jakichś tam pomieszczonkach itp.
Arty
I to ma być narodowy system BMS, przecież ten sprzęt wygląda jak z lat 80-tych, a w 90-tych na Commodore grywano już w lepsze strategie.
ren
czy prawdą jest, że nieterminowo i nienależycie realizowane są dużo mniejsze i dużo mniej znaczące umowy? czy to prawda, że np. ostatnio nie wykonano umowy na tempesty dla jednej ze służb wojskowych? czy prawdą jest także, że dawno jest po umownym terminie realizacji symulatora lotu samolotu MIG, nawet pomimo zaangażowania w to przedsięwzięcie przemysłu jednego z południowych sąsiadów naszego kraju itp.?